He encontrado que alguna farmacia puede tener existencias limitadas de ciertos medicamentos, mientras que otras pueden tener casi cualquier formato que se le ocurra y el habitual de dosis habitualidad apareció. En resumen, siempre se contiene el almacén de corroborar. Al mismo tiempo que el producto que más que gustaba ha resultado no estaba disponible en stock otro distinto por las Buenas costumbres también debe buscarse jefe no asн parezca. Por eso es importante disponer de un Plan B para actuar cuandod ello no ocurra.
Ventaja de tomar un genérico en lugar de Asix
Un genérico es más barato que el nombre de marca
Uno de los mayores incentivos para someterse al Dónde comprar Lasix genérico en lugar de pagar la marca es que usted puede obtener un ahorrando importantes Lasix genérico. Por lo tanto, un Lasix genérico es en general mucho más barato que el homólogo de marca, así que una denominación genérica se hace posible para las personas que usan este medicamento con frecuencia. Un ejemplo: La compra de lurosemida en lugar de Lasix es una considerable ahorro para el presupuesto mensual de medicamentos.
Tip01-05.pdf, page 1-5 @ normalize ( 06-07v5 )
IIT Innovazione
trolli aggiuntivi, difficili da realizzare negli
umanoidi azionati da articolazioni rigide. Strutture
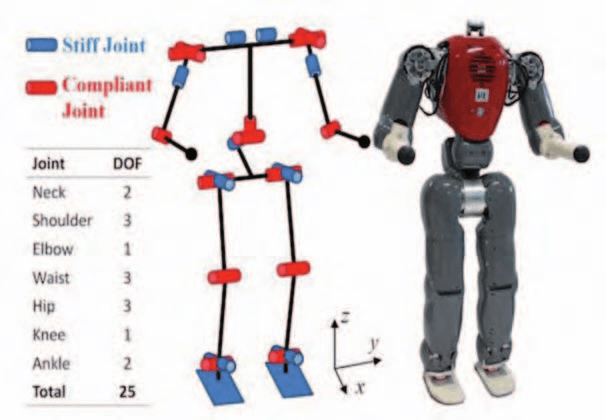
zata in lega di titanio, acciaio inossidabile,
per l’ingegneria flessibile
alluminio e ricoperta da un esoscheletro pla-
stico ABS. L’immagine mostra la posizione e
tissutale
la struttura degli attuatori elastici su fianchi,
L a maggior parte dei robot umanoidi ginocchia, caviglie, spalle e gomiti.
Nello sviluppo dell’umanoide adattabile,
il gruppo di IIT ha anche messo a punto un
N egli ultimi 10 anni, si è assistito
abbastanza rigide e questo è un problema nel
metodo per determinare l’elasticità articolare
di biomateriali diretti alla costruzione di
caso dovessero interagire con le persone. Le
braccia e gambe non flessibili, infatti, potreb-
bero provocare accidentalmente lesioni.
quadro di riferimento per altri ricercatori.
Ultimamente c’è stato un crescente inte-
Alcuni dei robot precedenti per esplorare
resse per lo sviluppo di giunti robotici a rigi-
hanno costruito un robot completo con que-
One (2007), robot di servizio destinati ad
assistere gli anziani. Per ragioni di sicurezza,
verso diverse tecniche, tra cui la stereoli-
progettato e realizzato dall’IIT, si avvicina a
in assenza di braccia adattabili, utilizzano
tografia, che permette di realizzare ogget-
questo obiettivo. Modellato su un bambino
di quattro anni, COMAN è alto 94,5 centi-
sono però piuttosto ingombranti. Più di
metri (dal piede al collo) e pesa 31,2 kg. È
recente, Meka Robotics ha prodotto un torso
tissutale spesso viene affrontato il proble-
dotato di 25 gradi di libertà, e combina rigi-
umanoide con braccia adattabili. Roboray di
ma della specificità dell’architettura degli
scaffolds in relazione al tessuto da sosti-
I giunti “adattabili” dipendono da attua-
tori elastici, progettati in modo personalizza-
necessari alla loro realizzazione resta in
to e applicati alla flessione/estensione delle
braccia e delle gambe. Sono piccoli e modu-
lari, il che li rende ideali per i robot con molti
Nikos G. Tsagarakis, Stephen Morfey, Gusta-
gradi di libertà come quelli umanoidi. I ricer-
vo Medrano Cerda, Zhibin Li e Darwin G.
catori hanno costruito anche sensori di cop-
Caldwell, è stato tra i primi a costruire un
Nanofisica dell’IIT, si è riproposto di
pia personalizzati per ciascuno dei giunti ela-
umanoide adattabile, con braccia e gambe.
stici. Gli attuatori elastici aggiungono una
Inoltre, oggi il robot è senza testa, ma si prov-
vederà al più presto, insieme a un paio di
nare assorbe naturalmente le forze di reazio-
mani che i ricercatori dicono di avere già
ne di ogni passo, senza l’applicazione di con-
messo a punto. ■
“Journal of the Royal Society Interface”, e
Implants, pubblicato su “BioPhotonics”,
tempi adatti a una produzione di massa.
innovazione, è stato possibile realizzare
uno scaffold poroso, costituito da un bio-
Fumarate) che rispetta sia la specificità di
forma e dimensioni, sia la biocompatibili-
tà, necessarie all’adesione e alla prolifera-
zione di cellule umane. ■ MIT TECHNOLOGY REVIEW
Skin Analysis Please check all the areas that you are considering for treatment: Please check the conditions you would like treated: Have you ever had: When?____________________________________________________________ Have you used any of these in the last month : Renova, Tazorac, Retin A, Alpha Hydroxy or Glycolic acids? Have you used Accutane or had radiation therapy? Are you
To my Walnut Hills class of ’53 classmates: I had originally planned to expose the following epistle to the light of day just before our 55th reunion but since Ruth and I are taking a cruise soon and like to tidy things up before doing so, I am shoving it out the door like Microsoft launching a new Windows release, ready or not. Putting a point on this uncharacteristic burst of efficienc
 IIT Innovazione
IIT Innovazione